
An alternative version to the CJMCU board.
CJMCU is a quadcopter for brushed motors, which has the integrated control board in the structure. CJMCU2 is an alternate version of this board with a free and open source license. This is the main documentation page for this project.
For Open Light Motion project we are designing our own micro brushed quadcopters for indoor flights. We started with the original CJMCU scheme with the initial objective of making a drone with integrated PCB, which is equivalent to the existing CJMCU firmware for Cleanflight software.
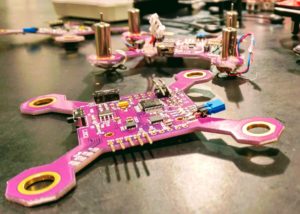
This is the quadcopter CJMCU, which has the flight board with STM32 processor integrated into the structure.
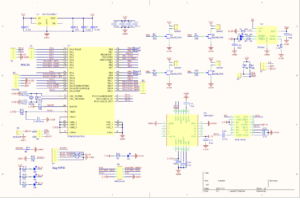
This is the schematic that circulates through the network, originally found in the forums of Multiwii.com. From here we have designed an alternative PCB and made some changes.
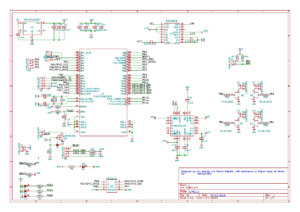
To do the design we have used the KiCad open source software, a free program that is already very mature for working with PCB’s.
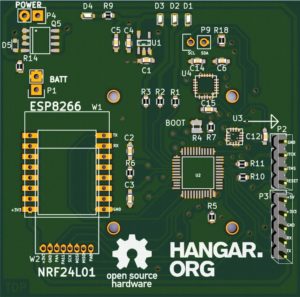
Specifically, we have modified the following elements:
- Eliminated the integrated (TP4056), switch and battery charging circuit (saving weight and cost, charging with external charger).
- Now the plate has 4 M2 holes to add extensions easily.
- Removed pins from the boot jumper. (Less weight, you can keep updating manually).
- Inserted battery protection circuit.
- SPI port for connecting a NRF24L01 SMD radiofrequency module.
- Serial port to connect an ESP8266 Wifi module.
- Replaced oscillator by SMD quartz crystal (less weight).
- SDA and SCL are now through hole.
- Changed the 3 to 2-pin Power switch. (Reduce weight).
View of front and rear plate:
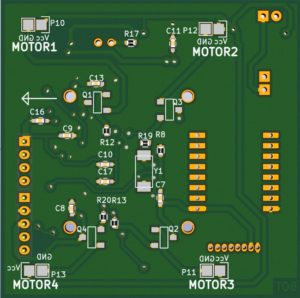
Note: these plates are only for test porpouses and are much larger than their final size because we are going to solder them manually.
For download or more technical information, we have created a repository of CJMCU2 in GitHub to host the project.
